Markus presents “Vision-Based Fallen Person Detection for the Elderly” at ICCV 2017


Venue: ICCV 2017 Workshop: ACVR, Venice, 2017
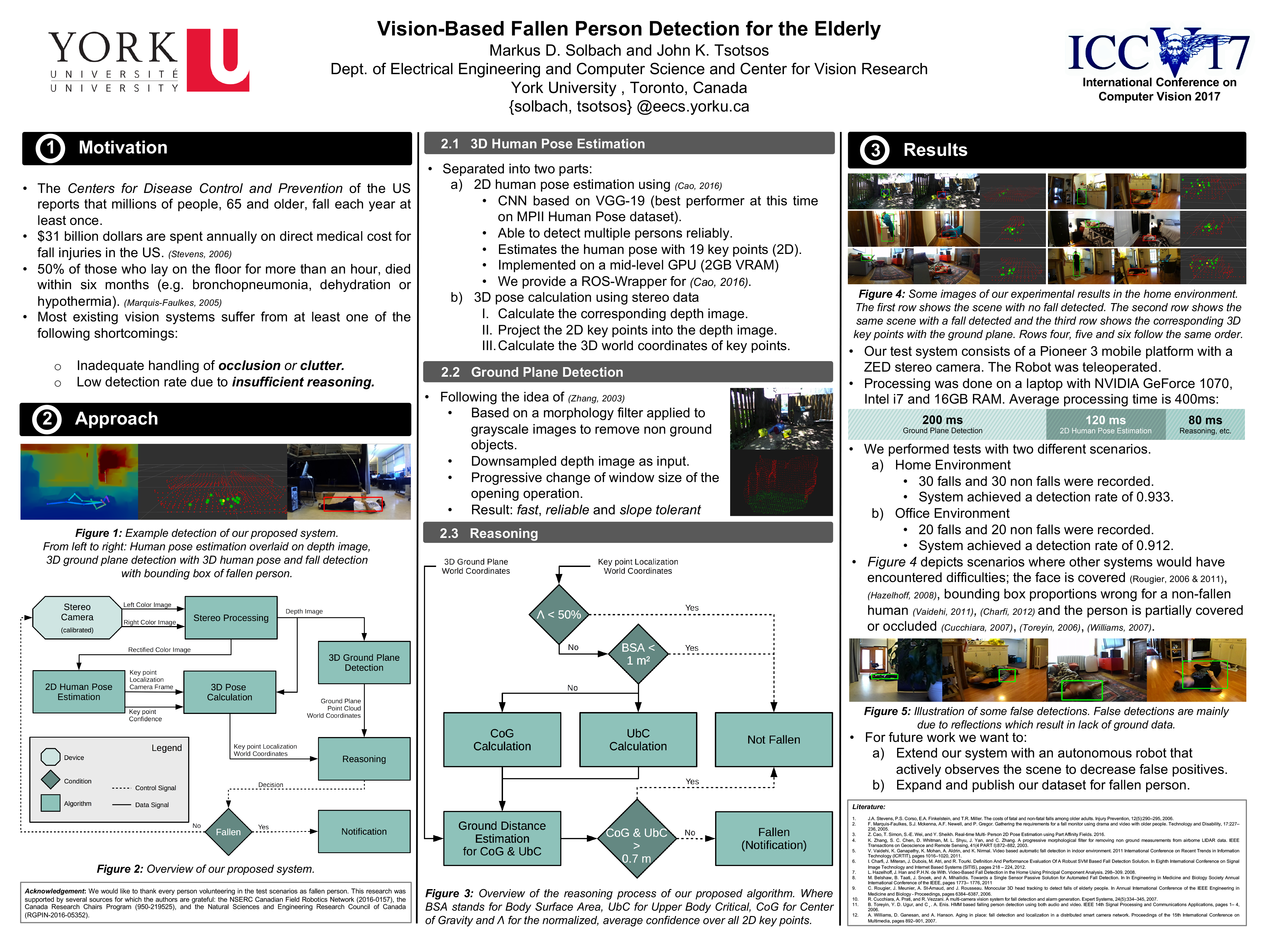
Paper: Vision-Based Fallen Person Detection for the Elderly
Project link: https://github.com/TsotsosLab/fallen-person-detector
Abstract:
Falls are serious and costly for elderly people. The Centers for Disease Control and Prevention of the US reports that millions of older people, 65 and older, fall each year at least once. Serious injuries such as; hip fractures, broken bones or head injury, are caused by 20% of the falls. The time it takes to respond and treat a fallen person is crucial. With this paper we present a new, non-invasive system for fallen people detection. Our approach uses only stereo camera data for passively sensing the environment. The key novelty is a human fall detector which uses a CNN based human pose estimator in combination with stereo data to reconstruct the human pose in 3D and estimate the ground plane in 3D. Furthermore, our system consists of a reasoning module which formulates a number of measures to reason whether a person is fallen. We have tested our approach in different scenarios covering most activities elderly people might encounter living at home. Based on our extensive evaluations, our systems shows high accuracy and almost no miss-classification. To reproduce our results, the implementation is publicly available to the scientific community.
Poster: