Navigation
Person-following Robot
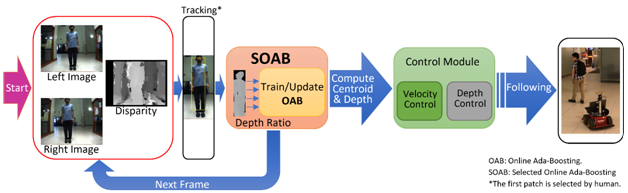
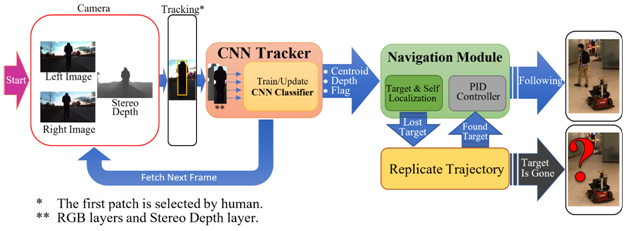
Person following behavior is an important task for social robots. To enable robots to follow a person, we have to track the target in real-time without critical failures. There are many situations where the robot will potentially loose tracking in a dynamic environment, e.g., occlusion, illumination, pose changes, etc. To solve these critical problems, we built two person-following algorithms on different hardware platforms: (1) SOAB runs on a system without a dedicated GPU, (2) CNN_RGBSD requires a dedicated GPU. We also built a human tracking dataset with stereo images (left, right, and depth images).
Publications
Bao Xin Chen*, Raghavender Sahdev*,
and John K. Tsotsos “Person Following Robot Using Selected Online
Ada-Boosting with Stereo Camera” in Computer and Robot Vision (CRV),
2017 14th Conference on, IEEE, 2017, pp. 48-55.
Project page link: http://jtl.lassonde.yorku.ca/2017/02/person-following/
Bao Xin Chen*, Raghavender Sahdev*,
and John K. Tsotsos “Integrating Stereo Vision with a CNN Tracker for
a Person-Following Robot” in 11th International Conference on
Computer Vision Systems (ICVS), Springer, 2017, pp. 300-313.
Project page link: http://jtl.lassonde.yorku.ca/2017/05/person-following-cnn/
* denote as equal contribution