PlayBot – Interface Design
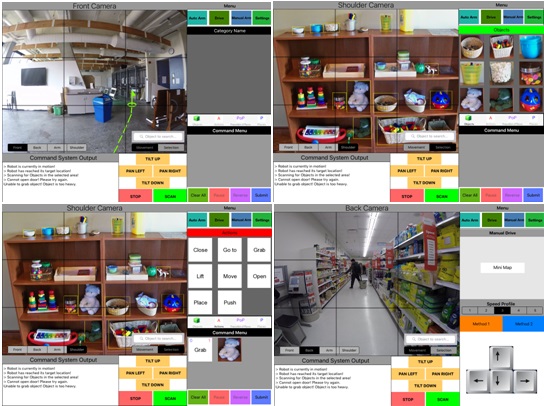
Goal 1: Design a touch screen user interface for the iPad that allows users with limited upper body mobility (e.g. elderly, user’s with a physical disability) to control an intelligent power wheelchair that has a wheelchair mounted robotic arm (WMRA) attached to it with the desire/intent to assist users in their activities of daily living (ADL). Some of the features that are part of the interface include: Central control (i.e. enable/disable of other interfaces, settings configuration); Capability to select a 2D pixel, which translates to a 3D world coordinate, from the live camera field of view to be passed on to the autonomous navigation system (Figure 1); Global area specification (e.g. kitchen, living room, bedroom) whose world coordinates are passed on to the autonomous navigation system; Scraping objects (Figure 2), via detection and recognition algorithms, in the scene (camera’s field of view) which are then fed to a local database and displayed to the user allowing them to select from the list of objects (i.e. cropped images) and form high level commands (Figure 3) that are passed to the wheelchair mounted robotic arm system for it to execute the given command. Example tasks would be to: pickup cup from table, open the door, put bottle on top of the desk but next to the plate, etc.
Publications
Tsotsos, J.K., Verghese, G., Dickinson, S., Jenkin, M., Jepson, A., Milios, E., Nuflo, F., Stevenson, S., Black, M., Metaxas, D., Culhane, S., Ye, Y., Mann, R., PLAYBOT: A visually-guided robot to assist physically disabled children in play, Image & Vision Computing Journal, 16, p275-292, April 1998.
Fine, G., Tsotsos, J.K, Examining The Feasibility Of Face Gesture Detection For Monitoring Of Users Of Autonomous Wheelchairs, Ubiquitous Computing And Communication Journal, Special Issue of Media Solutions that Improve Accessibility to Disabled Users, 2010.
Andreopoulos, A., Tsotsos, J.K., Active Vision for Door Localization and Door Opening using Playbot: A Computer Controlled Wheelchair for People with Mobility Impairments, Fifth Canadian Conference on Computer and Robot Vision, Windsor, Ont., May 28-30, 2008.
Andreopoulos, A., Tsotsos, J.K., A Framework for Door Localization and Door Opening Using a Robotic Wheelchair for People Living with Mobility Impairments, RSS 2007 Manipulation Workshop: Sensing and Adapting to the Real World, Atlanta, Jun. 30, 2007.
Rotenstein, A., Andreopoulos, A., Fazl, E., Jacob, D., Robinson, M., Shubina, K., Zhu, Y., Tsotsos, J.K., Towards the dream of intelligent, visually-guided wheelchairs, Proc. 2nd International Conference on Technology and Aging, Toronto, Can. June, 2007.
Tsotsos, J. K. and Dickinson, S. and Jenkin, M. and Milios, E. and Jepson, A. and Down, B. and Amdur, E. and Stevenson, S. and Black, M. and Metaxas, D. and Cooperstock, J. and Culhane, S. and Nuflo, F. and Verghese, G. and Wai, W. and Wilkes, D. and Ye, Y., ‘The PLAYBOT Project’, In J. Aronis Ed., Proc. IJCAI Workshop on AI Applications for Disabled People, Montreal, 1995.