PlayBot – Hardware Design
[wordpress_file_upload uploadpatterns=”*.*, *.stl*”]
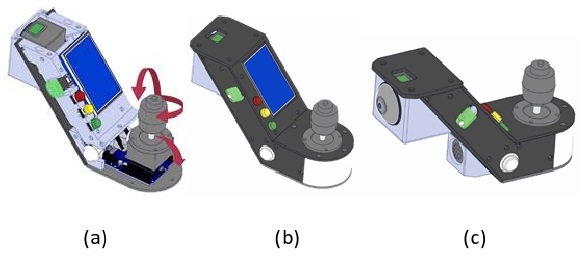
Designing and constructing a Wheelchair platform for research in application of AI in rehabilitation. PlayBot provides researcher with a platform to test and verify their Autonomous system design. Various different types of system can be tested on playbot, such as Person Following [1], head pose recognition[2], visually guiding the wheelchair [3] etc. The wheelchair is designed with various safety measures building, such as remote shutdown, power drainage checks etc. These measures are included to operate safely inside the lab. The design incorporates low level designs as well, such as designing the smart joystick, a RTOS microcontroller for control, RC remote etc.


References
[1] Chen, Bao Xin, Raghavender Sahdev, and John K. Tsotsos. “Person following robot using selected online ada-boosting with stereo camera.” 2017 14th Conference on Computer and Robot Vision (CRV). IEEE, 2017.
[2] Bauckhage, Christian, et al. “Fast learning for customizable head pose recognition in robotic wheelchair control.” 7th International Conference on Automatic Face and Gesture Recognition (FGR06). IEEE, 2006.
[3] Rotenstein, A., et al. “Towards the dream of intelligent, visually-guided wheelchairs.” Proc. 2nd Int’l Conf. on Technology and Aging. 2007.