Pedestrian behavior understanding
The goal of this project is to observe and understand pedestrian actions at the time of crossing, and identify the factors that influence the way pedestrians make crossing decision. We intend to incorporate these factors into predictive models in order to improve prediction of pedestrian behavior.
Key Results
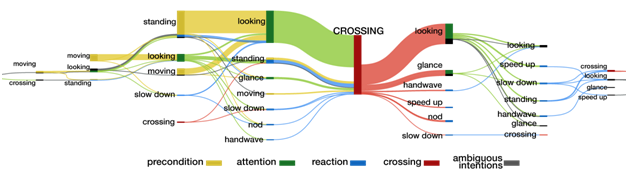
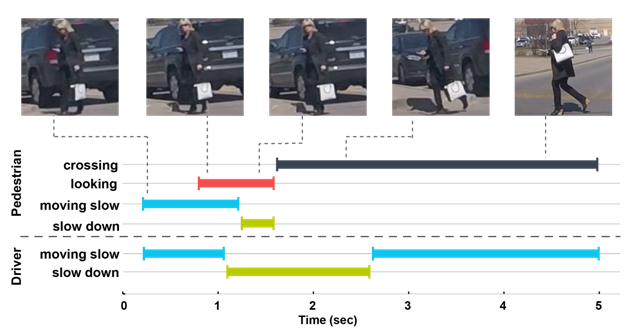
We found that join attention, i.e. when pedestrians make eye contact with drivers, is a strong indicator of crossing intention. We identified numerous factors, such as demographics, street structure, driver behavior, that impact pedestrian crossing behavior. The way pedestrians communicate their intention and the meaning of communication signals also were explored. Our initial experimentation suggests that including such information in practical applications can improve prediction of pedestrian behavior.
Publications
A. Rasouli and J. K. Tsotsos, “Autonomous vehicles that interact with pedestrians: A survey of theory and practice,” IEEE Transactions on Intelligent Transportation Systems, 2019.
A. Rasouli, I. Kotseruba, and J. K. Tsotsos, “Agreeing to cross: How drivers and pedestrians communicate,” In Proc. Intelligent Vehicles Symposium (IV), 2017, pp. 264–269.
A. Rasouli, I. Kotseruba, and J. K. Tsotsos,“Are they going to cross? a benchmark dataset and baseline for pedestrian crosswalk behavior,” In Proc. International Conference on Computer Vision (ICCV) Workshop, 2017, pp. 206–213.
A. Rasouli, I. Kotseruba, and J. K. Tsotsos, “Towards Social Autonomous Vehicles: Understanding Pedestrian-Driver Interactions,” In Proc. International Conference on Intelligent Transportation Systems (ITSC), pp. 729-734, 2018.